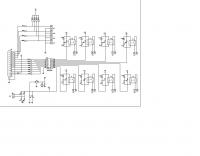
Wenn am Eingang A des 2003 ein High-Pegel anliegt (5V), schaltet Ausgang A nach GND durch (hängt an Pin 9 für alle Ausgänge gemeinsam), ansonsten nicht. Pin 10 (Freilaufdioden, wichtig für induktive Lasten) wird an 12V angeklemmt, genau wie die ganzen Lüfter. Das war's.
Belegung des Parallelports:
http://en.wikipedia.org/wiki/LPT
Die Pins 2-9 kannst Du als Ausgänge nutzen, die Pins 10-13 als Eingänge.
Die Funktion der 100Ω-Widerstände hat KS ja schon erläutert

(Den Rest eigentlich auch, aber doppelt hält besser...)
Hier noch zwei Threads, die lesenswert für Dich sind:
http://www.mikrocontroller.net/topic/22791
http://www.mikrocontroller.net/topic/40393
Da steht was über geeignete PWM-Frequenzen drin (habe einfach mal "pwm lüfter frequenz" gegoogelt). Außerdem gibt's da noch was zum Thema Spannungsglättung hinter der PWM (für die Elektronik des bürstenlosen Motors, so welche wirst Du wahrscheinlich haben). Vermutlich ist es bei Deinen Lüftern mit ein paar kleinen Kondensatoren gegen GND getan, siehe Tip #14 auf Seite 36:
http://www.mikrocontroller.net/attachment/7595/CCP_Tricks.pdf
Außerdem sollten die 12V auf deiner Platine mit einem Elko (ca. 100µF) und einem Kerko (ca. 100nF) stabilisiert werden. Nicht, dass die PWM noch den Rechner stört.
Bei Fragen fragen.
Nachtrag:
Hier steht, dass PWM-geregelte PC-Lüfter normalerweise mit einer Frequenz um 25kHz gesteuert werden:
http://board.gulli.com/thread/82604.....ieen/
20 kHz sollten es auch tun. Gibt etwas weniger Schaltverluste und ist noch oberhalb der Hörgrenze.
Gruß, Bartho
[ Diese Nachricht wurde geändert von: Bartholomew am 26 Jul 2009 2:14 ]